33-99 ถนนมูฟู่ อี เขตกูลั่ว เมืองหนานจิง ประเทศจีน [email protected] | [email protected]
33-99 ถนนมูฟู่ อี เขตกูลั่ว เมืองหนานจิง ประเทศจีน [email protected] | [email protected]

ตามทฤษฎีแล้ว เครื่องทุบหินไฮดรอลิกทุกเครื่องจำเป็นต้องใช้แอคคิวมูเลเตอร์ที่สามารถปรับความดันได้ — โดยเฉพาะอย่างยิ่งแอคคิวมูเลเตอร์แรงดันสูงขนาดใหญ่
แอคคิวมูเลเตอร์แรงดันสูง ซึ่งติดตั้งอยู่ที่ทางเข้าของระบบเครื่องทุบหินไฮดรอลิก มีหน้าที่สามประการ ดังนี้:
(1) เพื่อสมดุลย์ระหว่างปริมาณน้ำมันที่จ่ายเข้าระบบกับปริมาณน้ำมันที่ถูกใช้ไปในระบบ เมื่อปั๊มจ่ายน้ำมันออกมามากกว่าปริมาณน้ำมันที่ระบบใช้ แอคคิวมูเลเตอร์แรงดันสูงจะดูดซับน้ำมันส่วนเกินและทำหน้าที่เป็นอุปกรณ์เก็บน้ำมันไว้ เมื่อปั๊มจ่ายน้ำมันออกมาน้อยกว่าปริมาณน้ำมันที่ระบบใช้ แอคคิวมูเลเตอร์จะปล่อยน้ำมันออกมาเพื่อชดเชยส่วนขาด ทำหน้าที่เป็นอุปกรณ์จ่ายน้ำมัน แอคคิวมูเลเตอร์แรงดันสูงจึงทำหน้าที่สมดุลย์ปริมาณน้ำมันที่ไหลเกินหรือขาดในระบบ และเป็นส่วนประกอบสำคัญที่ช่วยให้ระบบทำงานอย่างเสถียร
(2) เพื่อดูดซับการผันผวนของแรงดันในระบบ และลดแรงดันกระชากเล็กน้อย ซึ่งช่วยปกป้องท่อและชิ้นส่วนไฮดรอลิก รวมทั้งยืดอายุการใช้งานของชิ้นส่วนเหล่านั้น
(3) ในการออกแบบกลไกการกระแทกด้วยไฮดรอลิกโดยใช้ทฤษฎีตัวแปรเชิงนามธรรม ช่วยให้สามารถกำหนดแรงเทียบเท่าได้ ตราบใดที่แอคคิวมูเลเตอร์ถูกออกแบบอย่างถูกต้อง ก็จะสามารถได้แรงเทียบเท่าที่แม่นยำ ซึ่งรับประกันว่าระบบจะบรรลุเงื่อนไขด้านจลนศาสตร์และพลศาสตร์ที่ต้องการ
เนื่องจากแอคคิวมูเลเตอร์แรงดันสูงมีบทบาทสำคัญในระบบเครื่องทุบหินแบบไฮดรอลิก — โดยเฉพาะหน้าที่พิเศษของมันในการรับประกันว่าระบบจะบรรลุเงื่อนไขด้านจลนศาสตร์และพลศาสตร์ที่ต้องการ — การจัดตั้งทฤษฎีและวิธีการออกแบบแอคคิวมูเลเตอร์แรงดันสูงอย่างถูกต้องจึงมีความสำคัญมาก
ปริมาตรการปล่อยที่มีประสิทธิภาพเป็นพารามิเตอร์สมรรถนะที่สำคัญของแอคคิวมูเลเตอร์ และยังเป็นพื้นฐานสำหรับการคำนวณการออกแบบแอคคิวมูเลเตอร์อีกด้วย เมื่อเครื่องทุบหินแบบไฮดรอลิกทำงานในภาวะคงตัว ปริมาตรน้ำมันสูงสุดที่แอคคิวมูเลเตอร์เก็บและปล่อยออกในหนึ่งรอบการทำงานจะเรียกว่า ปริมาตรการปล่อยที่มีประสิทธิภาพ ซึ่งแทนด้วยสัญลักษณ์ Δ V .
ปริมาตรการปล่อยที่มีประสิทธิภาพ Δ V เกี่ยวข้องกับลักษณะการเคลื่อนที่ (kinematics characteristics) เมื่ออัตราการไหลของปั๊มคงที่ และโครงสร้างรวมทั้งลักษณะการเคลื่อนที่ของเครื่องทุบหินไฮดรอลิกคงที่ พลังงานกระแทก W H ความถี่ f H และปริมาตรการปล่อยที่มีประสิทธิภาพ Δ V จะต้องคงที่ทั้งหมด ดังนั้น ในการออกแบบแอคคิวมูเลเตอร์ ปริมาตรการปล่อยที่มีประสิทธิภาพจึงทราบค่าอยู่แล้ว วิธีการคำนวณ Δ V จะกล่าวไว้ในบทต่อๆ ไป
พื้นฐานสำหรับการคำนวณปริมาตรที่มีประสิทธิภาพของแอคคิวมูเลเตอร์ V เอ คือปริมาตรการปล่อยที่มีประสิทธิภาพจริง Δ V เมื่อ Δ V ทำงานภายในแอคคิวมูเลเตอร์ จะทำให้ความดันน้ำมันในระบบเปลี่ยนแปลงอย่างหลีกเลี่ยงไม่ได้ และแรงเทียบเท่า F g ต้องรักษาไว้ ดังนั้น จึงจำเป็นต้องศึกษาวิธีการคำนวณการออกแบบแอคคิวมูเลเตอร์ที่สอดคล้องกับข้อกำหนดข้างต้น ไดอะแกรมความดัน (แรง) เทียบกับปริมาตรของแอคคิวมูเลเตอร์ระหว่างการใช้งานแสดงไว้ในรูปที่ 3-2
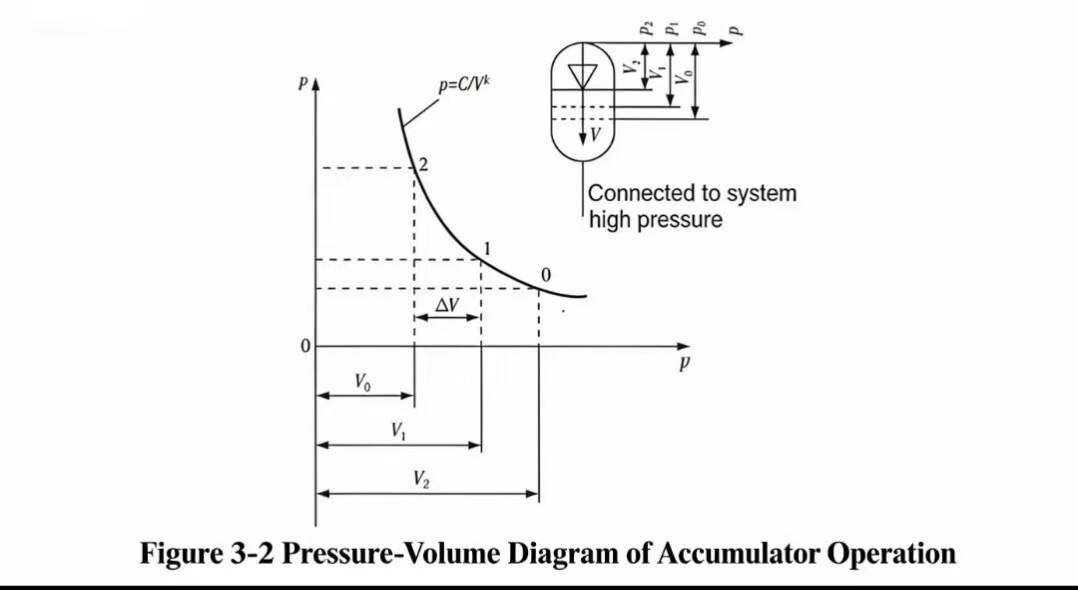
แม้ว่าความถี่ในการทำงานของเครื่องทุบหินไฮดรอลิกจะไม่สูงมากนัก แต่กระบวนการอัดและขยายไนโตรเจนภายในก็เกิดขึ้นอย่างรวดเร็วเช่นกัน ทำให้ไม่มีเวลาเพียงพอสำหรับแลกเปลี่ยนความร้อนกับสิ่งแวดล้อมภายนอก จึงสามารถพิจารณาเป็นกระบวนการแบบไม่ถ่ายเทความร้อน (adiabatic process) ได้ จากสมการสถานะของก๊าซ:
p 1V k 1 = p 2V k 2 = p เอ V k เอ (3.12)
ที่ไหน: p เอ — ความดันเริ่มต้น (charge pressure) กล่าวคือ ความดันของก๊าซที่ถูกปิดผนึกไว้
V เอ — ปริมาตรเริ่มต้น (charge volume) กล่าวคือ ปริมาตรของแอคคิวมูเลเตอร์เมื่อปลั๊ก (piston) อยู่ที่จุดกระทบ (โดยทั่วไปคือ ปริมาตรการทำงานสูงสุด) V amax );
p 2— ความดันการทำงานสูงสุด
V 2— ปริมาตรที่สอดคล้องกับ p 2(โดยทั่วไปคือ ปริมาตรการทำงานต่ำสุด) V 2 นาที );
p 1— ความดันการทำงานต่ำสุด
V 1— ปริมาตรที่สอดคล้องกับ p 1, V 1 < V เอ .
ในสมการ (3.12), k = 1.4 คือเอกซ์โพเนนต์อะเดียบาติก อย่างชัดเจน:
δ V = V 1 − V 2 (3.13)
จากสมการ (3.12):
V 1 = V เอ (p เอ / p 1)1/K (3.14)
V 2 = V 1 (p 1 / p 2)1/K (3.15)
แทนค่าลงในสมการ (3.13) จะได้:
δ V = V เอ (p เอ / p 1)1/K [1 − 1 / ( p 2 / p 1)1/K ] (3.16)
ในสมการ (3.16) ให้ p เอ / p 1 = เอ = 0.8 ถึง 1; และอัตราส่วนความดันทำงานของก๊าซ γ = p 2 / p 1, โดยทั่วไป γ = 1.2 ถึง 1.45 ซึ่งเลือกตามลักษณะการทำงานของเครื่องทุบหินไฮดรอลิก เอ = 1 ความดันทำงานต่ำสุดของลูกสูบจะเท่ากับความดันชาร์จ ( p เอ = p 1); ในสถานะนี้ V 1 = V เอ เพื่อป้องกันไม่ให้เยื่อหุ้มแอคคิวมูเลเตอร์สัมผัสฐานที่ความดันทำงานต่ำสุดของเครื่องทุบหินไฮดรอลิก — ซึ่งจะทำให้อายุการใช้งานสั้นลง — เอ ควรตั้งค่าให้น้อยกว่า 1
มีสองประเด็นที่ต้องพิจารณาในการเลือก γ : เมื่อ γ มีค่ามาก เนื่องจากแอคคิวมูเลเตอร์ทำงานในสภาวะอะเดียบาติก อุณหภูมิจะเพิ่มขึ้นอย่างรวดเร็ว ซึ่งอาจทำให้เยื่อหุ้มแอคคิวมูเลเตอร์เสื่อมสภาพก่อนกำหนด หรือแม้แต่ไหม้เสียหายได้; แต่การเพิ่ม γ สามารถลดปริมาตรที่มีประสิทธิภาพ V เอ ของแอคคิวมูเลเตอร์ได้อย่างมีประสิทธิภาพ ซึ่งเป็นประโยชน์อย่างยิ่งต่อการลดขนาดโครงสร้างของแอคคิวมูเลเตอร์ ผู้ออกแบบจำเป็นต้องพิจารณาข้อดีและข้อเสียอย่างรอบคอบ และตัดสินใจตามเงื่อนไขการใช้งานจริง ดังนั้น:
δ V = V เอ เอ 1/K (1 − 1 / γ 1/K ) (3.17)
จากสมการ (3.17) สามารถหาปริมาตรที่มีประสิทธิภาพของแอคคิวมูเลเตอร์ได้:
V เอ = Δ Vγ 1/K / [ เอ 1/K (γ 1/K − 1)] (3.18)
สมการ (3.18) แสดงให้เห็นว่า จากปริมาตรการปล่อยที่มีประสิทธิภาพ Δ V สามารถหาปริมาตรการชาร์จที่สอดคล้องกันได้ เพื่อให้มั่นใจว่าจะบรรลุกลไกเชิงจลศาสตร์ที่ออกแบบไว้และ Δ V ที่กำหนดไว้ ในทางปฏิบัติ ปริมาตรการปล่อยที่มีประสิทธิภาพ Δ V คือปริมาณน้ำมันที่แอคคิวมูเลเตอร์จ่ายเสริมให้กับลูกสูบในช่วงจังหวะกำลัง เพื่อชดเชยปริมาณน้ำมันที่ปั๊มจ่ายไม่เพียงพอ
สำหรับการคำนวณการออกแบบปริมาตรการปล่อยที่มีประสิทธิภาพ Δ V , โปรดดูรายละเอียดในข้อ 7.5 ในการตอบสนองความต้องการของการออกแบบที่เหมาะสม สำหรับวัตถุประสงค์ในการออกแบบที่แตกต่างกัน การคำนวณปริมาตรการจ่ายของเหลวที่มีประสิทธิภาพ Δ V จะเปลี่ยนแปลงไปตามที่เลือก α u (ดูข้อ 7.2.5 และ 7.27a)
ณ จุดนี้ แม้ว่า V เอ จะถูกหาค่าได้แล้วและสามารถนำมาใช้ในการออกแบบพารามิเตอร์เชิงโครงสร้างของแอคคิวมูเลเตอร์ได้ แต่ภารกิจการคำนวณการออกแบบแอคคิวมูเลเตอร์ยังไม่เสร็จสมบูรณ์ ประเด็นที่สำคัญที่สุดคือวิธีควบคุมความดันน้ำมันให้สามารถสร้างแรงเทียบเท่าได้; และจะสามารถรับประกันการเคลื่อนไหวเชิงจลศาสตร์ (kinematics) ที่ออกแบบไว้ได้ก็ต่อเมื่อสามารถสร้างแรงเทียบเท่านั้น ซึ่งจะนำไปสู่การรับประกันค่า Δ V กล่าวอีกนัยหนึ่ง ค่า Δ มีความสัมพันธ์แบบสอดคล้องกับ V และ F g .
ต้องชี้ให้เห็นว่า เมื่อ V เอ เป็นค่าคงที่ p 1, p 2, และ p เอ อาจมีหลายชุดค่าที่เป็นไปได้ ซึ่งสามารถสร้างแรงเทียบเท่าหลายค่า จลนศาสตร์ (dynamics) หลายแบบ และการเคลื่อนไหวเชิงจลศาสตร์ (kinematics) หลายแบบ — กล่าวคือ ค่า Δ หลายค่า V ค่าต่างๆ ภาระงานต่อไปนี้คือ เมื่อกำหนดค่า V เอ แล้ว ให้หาชุดค่าของ p 1, p 2, และ p เอ ที่สามารถสร้างแรงเทียบเท่าที่ต้องการได้ F g และ Δ V เนื่องจากเมื่อ p เอ เปลี่ยนแปลง W H , f H , Δ V , p 1, และ p 2จะเปลี่ยนแปลงตามไปด้วยทั้งหมด กล่าวอีกนัยหนึ่ง ต้องมีความดันประจุ p เอ ที่สามารถรับประกันการบรรลุความดันเทียบเท่า p g ได้ แน่นอนว่าพื้นฐานสำหรับการหา p เอ is p 1และ p 2, กล่าวคือ ความดันที่เทียบเท่า p g . เมื่อเข้าใจความสัมพันธ์ระหว่างพารามิเตอร์เหล่านี้แล้ว วิธีการหา p 1, p 2, และ p เอ จากความดันที่เทียบเท่า p g สามารถศึกษาได้
รูปที่ 3-2 แสดงแผนผังของ p –V ถังเก็บความดันสูงในระหว่างการปฏิบัติงาน บนพื้นฐานของแผนผังนี้ และโดยรวมหลักการแรงที่เทียบเท่า — งานที่ทำโดยแรงที่แปรผันจะเท่ากับงานที่ทำโดยแรงที่เทียบเท่า — เราได้:
p g δ V = ∫ V₂ V₁ p ดี V (3.19)
ในสมการ (3.19):
p = C / V k
แทนค่าลงในสมการ (3.19) แล้วทำการอินทิเกรต:
p g δ V = C ∫V₂ V₁ ดี V / V k = 1 ÷ (1 − k ) ( p 1V k 1V 1−k 1 − p 2V k 2V 1−k 2) (3.20)
ดังนั้น:
p g δ V = 1 ÷ (1 − k ) ( p 1V 1 − p 2V 2) (3.21)
การกําจัด V 1และ V 2โดยการแทนค่าและแทนสมการ (3.17) ลงในนั้น จะได้:
p g = p 1/ ( k − 1) · ( γ − γ 1/K ) ÷ ( γ 1/K − 1) (3.22)
หลังจากการจัดเรียงใหม่:
p 1 = p g (k − 1) ( γ 1/K − 1) / ( γ − γ 1/K ) (3.23)
ในสมการ (3.23) p g คือความดันที่เทียบเท่าซึ่งกระทำต่อพื้นผิวด้านที่รับแรงดันของลูกสูบ ทั้งนี้เมื่อพิจารณาการสูญเสียความดันภายในระบบ ค่าความดันนี้ควรแสดงเป็นความดันที่ระบุไว้สำหรับระบบ p g = p H / K . p 1และ p 2ค่าที่ได้มาด้วยวิธีนี้จะใกล้เคียงกับค่าจริงมากยิ่งขึ้น ดังนั้น:
p 1= ( p H / K )(k − 1)( γ 1/K − 1) / ( γ − γ 1/K ) (3.24)
p 2 = γp 1 (3.25)
p เอ = aP 1 (3.26)
ในสมการ (3.24) สัมประสิทธิ์ความต้านทานที่คำนึงถึงการสูญเสียแรงดันในระบบคือ K = 1.1 ถึง 1.2
เมื่อแอคคิวมูเลเตอร์แรงดันสูงของเครื่องทุบหินไฮดรอลิกทำงานภายใต้พารามิเตอร์เหล่านี้ จะรับประกันว่าเกิดผลของการเคลื่อนที่ของแรงเทียบเท่าตามที่กำหนด กลไกการเคลื่อนที่ที่ออกแบบไว้สามารถดำเนินการได้จริง และพลังงานกระแทกและความถี่ในการกระแทกที่ต้องการจะถูกส่งมอบอย่างครบถ้วน ด้วยวิธีนี้ ปัญหาการคำนวณที่ซับซ้อนจึงถูกทำให้ง่ายขึ้น และปัญหาเชิงไม่เชิงเส้นถูกแปลงให้เป็นเชิงเส้น
จากข้อความข้างต้น อุปกรณ์กระแทกไฮดรอลิก (สว่านหินไฮดรอลิกและเครื่องทุบหินไฮดรอลิก) ซึ่งเป็นระบบที่ไม่เชิงเส้น จึงถูกแปลงให้กลายเป็นระบบที่เชิงเส้น จากมุมมองเชิงทฤษฎี ลูกสูบสามารถเคลื่อนที่ผ่านช่วงชัก S ตามรูปแบบใดก็ได้ ตราบใดที่สามารถควบคุมการเคลื่อนที่ได้ และเมื่อถึงจุดกระแทก ลูกสูบจะบรรลุความเร็วสูงสุดที่ต้องการ v m — ทั้งหมดนี้เป็นไปได้จริง สำหรับรูปแบบการเคลื่อนที่ของลูกสูบแต่ละแบบ จะต้องมีรูปแบบการเปลี่ยนแปลงของแรงที่สอดคล้องกันเสมอ ทั้งสองสิ่งนี้มีความสัมพันธ์กันในเชิงเหตุและผล กล่าวอีกนัยหนึ่ง ไม่ว่าลูกสูบจะมีรูปแบบการเคลื่อนที่อย่างไร ก็จำเป็นต้องมีการประยุกต์ใช้รูปแบบการเปลี่ยนแปลงของแรงที่สอดคล้องกันนั้นให้กับมัน — แรงคือเหตุ ส่วนการเคลื่อนที่คือผล
แน่นอนว่า หลังจากออกแบบรูปแบบการเคลื่อนที่ที่เหมาะสมที่สุดแล้ว ก็สามารถหากรูปแบบการเปลี่ยนแปลงของแรงที่สอดคล้องกันได้ด้วย ซึ่งส่งผลให้เกิดหัวข้อวิจัยเชิงทฤษฎีสองหัวข้อสำหรับเครื่องทุบหินไฮดรอลิก ได้แก่ จลนศาสตร์ (Kinematics) และพลศาสตร์ (Dynamics) ของเครื่องทุบหินไฮดรอลิก

ยินดีต้อนรับสู่ Hovoo โรงงานปักผนึกจีน ผลิตปักผนึก PU, ยาง และ PTFE ปักผนึกประกอบด้วย O-ring, ปักผนึกพิสตอง, ปักผนึกไม้, ปักผนึกแหวนสีเทาและปักผนึกแก๊ส



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}