33-99No. Mufu E Rd. Gulou Bezirk, Nanjing, China [email protected] | [email protected]
33-99No. Mufu E Rd. Gulou Bezirk, Nanjing, China [email protected] | [email protected]

Die Forschungsidee hinter der Theorie des abstrakten Variablendesigns: Unabhängig davon, wie sich die Betriebsparameter eines hydraulischen Felsbrechers während des Betriebs ändern, dürfen die beiden Parameter, die die Konstruktionsanforderungen erfüllen – die Schlagenergie W H und Schlagfrequenz k H – sich nicht ändern; alle übrigen Parameter sind für den Konstrukteur weniger wichtig und insbesondere für den Anwender ohne besondere Relevanz. Der Konstrukteur sollte jedoch besonders auf den Kolbenhub achten S , da sich jedes Verhalten des Kolbens über einen festen Hub vollzieht S , und der Kolbenhub S ist durch die Konstruktion begrenzt — sie kann nicht beliebig gewählt werden. Ein zu großer Hub ist durch die mechanische Struktur nicht zulässig; ein zu kleiner Hub erfüllt nicht die Anforderungen an Energie und Frequenz des Schlagvorgangs. Mit anderen Worten handelt es sich um eine Betriebsbeschränkung des hydraulischen Felsbrechers, wobei ein optimaler Wert existieren muss.
Wie das Konstruktionsberechnungsproblem eines hydraulischen Felsbrechers — welches in Wirklichkeit ein nichtlineares System darstellt — mithilfe linearer Methoden behandelt wird, ist der Kerninhalt dieses Kapitels.
— Theoretische Grundlage für die Umwandlung eines nichtlinearen Systems in ein lineares System
Wenn ein hydraulischer Felsbrecher in Betrieb ist, sind die Betriebsparameter — wie beispielsweise der Systemdruck p , Kolbengeschwindigkeit v , Beschleunigung a , und die Kolbenlast — alle ändern sich nichtlinear und sind Funktionen der Zeit. Die Berechnung eines solchen Systems ist äußerst schwierig und komplex. Das Konstruktionsziel dieses Buches ist jedoch relativ einfach: die strukturellen Parameter und Betriebsparameter eines hydraulischen Felsbrechers zu ermitteln, der die erforderliche Schlagenergie liefert W H und Frequenz k H . Die Formel für die Schlagenergie lautet:
W H = ( m / 2) v 2m (3.1)
wo: m — Kolbenmasse, konstant;
v m — momentane Geschwindigkeit beim Aufprall des Kolbens auf das Meißelende, d. h. die maximale Schlaggeschwindigkeit; dies ist die Geschwindigkeit, die bei der Konstruktion gewährleistet werden muss.
Es gibt zwei Bedingungen, um die Erzielung der erforderlichen Schlagenergie sicherzustellen: Der Kolben muss eine bestimmte Masse und eine bestimmte Geschwindigkeit aufweisen. Bei einem hydraulischen Felsbrecher kann die Kolbenmasse m während der Bewegung nicht verändert werden. Daher bedeutet die Sicherstellung der erforderlichen Schlagenergie, dass die maximale Schlaggeschwindigkeit v m erreicht wird.
Es ist darauf hinzuweisen, dass die Kolbenbewegung über einen vorgegebenen Hub erfolgt. Mit anderen Worten besteht das Ziel der Konstruktionsberechnung für einen hydraulischen Felsbrecher darin sicherzustellen, dass ein Kolben mit fester Masse über einen vorgegebenen Hub genau auf die vorgegebene maximale Schlaggeschwindigkeit beschleunigt wird v m innerhalb der vorgegebenen Zykluszeit T , auf den Meißelstift trifft und die vorgegebene Schlagenergie abgibt W H . Die momentanen Änderungen von a , v , und p während der Bewegung sind für das Ziel der Konstruktionsberechnung nicht relevant und können vernachlässigt werden. Die Sicherstellung der Zykluszeit T stellt zudem auch die vorgegebene Schlagfrequenz sicher k H .
Taktzeit T und Schlagfrequenz k H befriedigen k H = 60 / T , wobei T ist die Kolbenarbeitszykluszeit (der kurze Stillstand am Aufschlagpunkt wird der Einfachheit halber bei der Berechnung vernachlässigt).
Falls eine einfache Berechnungsmethode für die Konstruktion gefunden werden könnte, um das obengenannte Ziel zu erreichen, wäre dies für die ingenieurtechnische Konstruktion nützlich. Wie allgemein bekannt ist, treibt der hydraulische Öldruck den Kolben zur Leistung von Arbeit an; basierend auf dem Energieerhaltungssatz und unter Vernachlässigung sonstiger Energieverluste wird diese gesamte Arbeit in kinetische Energie des Kolbens umgewandelt und nach außen abgegeben, was folgende Beziehung ergibt:
(m / 2) v 2m = ∫ 0S K (S ) d S (3.2)
Die physikalische Bedeutung von Gl. (3.2): Die rechte Seite stellt die von der veränderlichen Kraft K (S ) über den Hub S geleistete Arbeit dar; die linke Seite stellt die kinetische Energie dar, die der Kolben beim Durchlaufen des Hubs gewinnt. S .
Um eine linearisierte Berechnung durchzuführen, kann man sich eine konstante Kraft K g vorstellen, die dieselbe Arbeit wie die veränderliche Kraft K (S ) über denselben Hub S leistet. Daher ist die konstante Kraft K g kann die veränderliche Kraft ersetzen K (S ) in der linearisierten Berechnung mit gleicher Wirkung, was ergibt:
(m / 2) v 2m = ∫ 0S K (S ) d S = K g × S (3.3)
Einsetzen von Gl. (3.1) in Gl. (3.3) ergibt:
K g = W H / S (3.4)
In Gl. (3.4) wird die konstante Kraft K g als äquivalente Kraft bezeichnet; sie verrichtet genau dieselbe Arbeit wie die veränderliche Kraft K (S ).
Gl. (3.4) ist die Formel zur Berechnung der äquivalenten Kraft. Die Stoßenergie W H = ( m /2)v 2m wird durch die Konstruktionsaufgabe vorgegeben und ist ein bekannter Parameter. Der Hub S kann aus den kinematischen Berechnungen ermittelt werden und ist ebenfalls bekannt; daher lässt sich die zur Erzielung der erforderlichen Stoßenergie notwendige äquivalente Kraft berechnen. Die richtige Auswahl des Konstruktionshubes S und der Frequenz k H , sowie die Optimierung des Hubs S , wird schrittweise in späteren Kapiteln eingeführt.
Diese äquivalente Kraft ist bei den Konstruktionsberechnungen für hydraulische Felsbrecher sehr nützlich. Auf der Grundlage der äquivalenten Kraft lässt sich die druckbelastete Fläche des Kolbens – also die konstruktiven Abmessungen des Kolbens – ermitteln, die Betriebsbedingungen und das effektive Volumen des Speichers bestimmen sowie kinematische und dynamische Berechnungen für den hydraulischen Felsbrecher durchführen.
Die druckbelastete Kolbenfläche beträgt:
A = K g / p g (3.5)
In Gl. (3.5) p g ist der äquivalente Öldruck des Systems, der dem Konzept der äquivalenten Kraft entspricht, und stellt eine virtuelle Variable dar. Da jedoch bei der Ölströmung Widerstandskräfte auftreten, muss der tatsächliche Systemarbeitsöldruck höher als der äquivalente Öldruck sein; daher lautet der im Konstruktionsprozess verwendete Nenndruck:
p H = KP g (3.6)
In Gl. (3.6) K = 1,12 bis 1,15 ist der Widerstandsbeiwert für den Betrieb des hydraulischen Systems. Der Wert von p H wird in der Praxis anhand der gesamten Anforderungen des zu konstruierenden Systems gewählt, sodass die druckbelastete Fläche des Kolbens berechenbar und bekannt wird. Daher:
A = KF g / p H (3.7)
Einsetzen von Gl. (3.4) ergibt:
A = KW H / ( p H S ) (3.8)
Es muss darauf hingewiesen werden, dass die aus den obigen Gleichungen berechneten kinematischen und dynamischen Ergebnisse nicht vollständig realistisch sind – sie werden als linear veränderlich beschrieben, d. h. die Kolbenbewegung wird als gleichmäßig beschleunigt und gleichmäßig verzögert behandelt. Die Kolbenzykluszeit T , maximale Geschwindigkeit v m und Hubweg S sind jedoch real; sie erfüllen die Konstruktionsanforderungen einfach, praktisch und genau.
Tatsächlich stellt sich die entscheidende Frage, ob die Stoßenergie W H , Stoßfrequenz k H , und Durchfluss Q zum Antrieb des hydraulischen Felsbrechers sind real. Da die Kolben-Druckfläche A konstant ist und der Hub S konstant ist, folgt daraus zwangsläufig, dass auch der Pumpendurchfluss Q real ist.
Auf diese Weise kann durch Anwendung des Prinzips der äquivalenten Kraft die nichtlineare Berechnung des hydraulischen Felsbrechers in eine lineare Berechnung vereinfacht werden; sowohl die Kinematik- als auch die Dynamikberechnungen können erheblich vereinfacht werden und als gleichmäßig beschleunigte bzw. gleichmäßig verzögerte Bewegung behandelt werden.
Die wissenschaftliche Erkenntnis hinter der äquivalenten Kraft besteht darin, den komplexen Prozess zu vernachlässigen, das Wesentliche des Problems zu erfassen und das nichtlineare Problem zu linearisieren. Die benötigten Ergebnisse sind jedoch sehr realistisch und zuverlässig und tragen dazu bei, das Verständnis und die Erforschung der Betriebsmuster des hydraulischen Felsbrechers zu vertiefen.
Basierend auf dem Äquivalenzkraftprinzip sind die Kolbengeschwindigkeit und die Kräfte wie in Abb. 3-1 dargestellt und umfassen drei Phasen: Beschleunigung im Rückhub, Verzögerung im Rückhub (Bremsphase) und Arbeitshub.
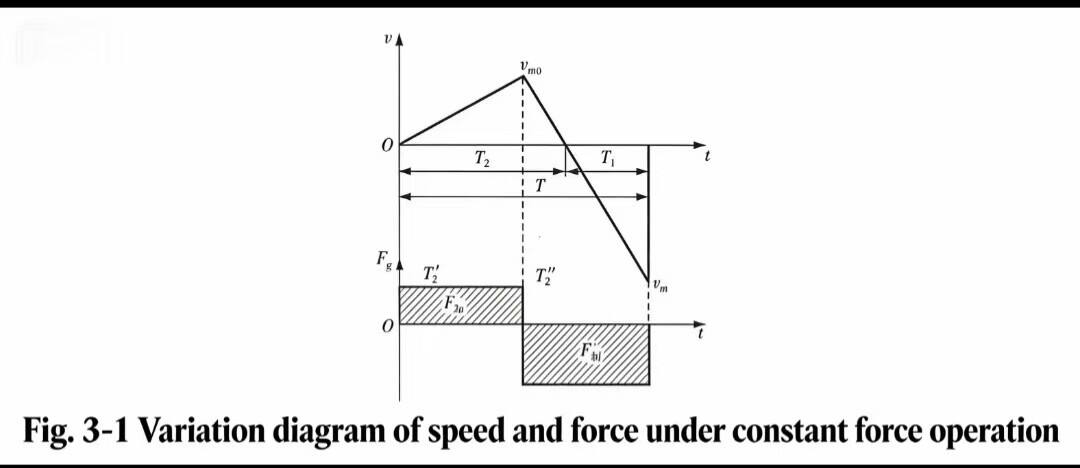
(1) Dynamikgleichung für die Beschleunigungsphase des Kolbenrückhubs
Sei die antreibende Kraft für den Rückhub K 2g , die Geschwindigkeit v und die Beschleunigung a als [+] definiert. Die äquivalente antreibende Kraft, die den Kolben im Rückhub beschleunigt, lautet:
K 2g = p g A ′2 = mA 2 (3.9)
wo: a 2= [+] — Beschleunigung des Kolbens im Rückhub;
A ′2— wirksame druckbelastete Fläche der vorderen Kolbenkammer;
p g — äquivalenter Systemdruck.
(2) Dynamikgleichung für die Verzögerungsphase des Kolbenrückhubs
Die äquivalente Antriebskraft, die den Kolben beim Rückhub verzögert, ist:
K 3g = p g A ′1 = mA 3 (3.10)
wo: a 3= [−] — Verzögerung (Bremsung) des Kolbens beim Rückhub.
(3) Dynamikgleichung für die Kolben-Arbeitsphase
Die äquivalente Antriebskraft, die den Kolben bei der Arbeitsphase beschleunigt, ist:
K 1G = p g A ′1 = mA 1 (3.11)
wo: a 1= [−] — Beschleunigung des Kolbens bei der Arbeitsphase;
A ′1— wirksame druckbelastete Fläche der Kolben-Hinterkammer.
Der Begriff der wirksamen druckbelasteten Fläche variiert je nach den drei unterschiedlichen Funktionsprinzipien des oben beschriebenen hydraulischen Felsbrechers; er wird im Kapitel zur Dynamik ausführlich behandelt.

Willkommen bei HOVOO, einer chinesischen Dichtungsfabrik. Produktion von PU-, Gummis- und PTFE-Dichtungen. Die Dichtungen umfassen O-Ring, Kolben-Dichtung, Stange-Dichtung, Grau-Ring und Gas-Dichtung.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}